机器人或会在月球上与我们“隔空相望”
发布时间:2022-09-27 16:43:58 【来源:智东西(公众号:zhidxcom)】
智东西(公众号:zhidxcom)
编译 | 刘柏涵
编辑 | 程茜
智东西9月27日消息,预计在2023年,由欧洲航天局和德国航天中心领导的研究团队将进行Surface Avatar项目的第一次大型太空机器人试验。此项目将探究机器人团队在行星表面上执行协作任务的可行性 ,并研究宇航员如何利用语音、手势、视线跟踪等多模态用户界面实现远程操控机器人。
此前,该研究团队参与了在埃特纳山的ARCHES试验活动,完成了机器人探测器自动驶向宇航员设定的标记点和利用神经系统进行自动采集样本等任务。
一、宇航员“化身”机器人,远程登陆其他星球
我们可以设想一个这样的场景,在未来,机器人可以去探索和开发地球的附近的行星、卫星和小行星,他们能在地球以外的星球表面采集样本、构造建筑和部署仪器等。
目前,此科研团队正在想办法设计这种机器人探测器,他们现在重点研究解决这样一个问题:如何为宇航员提供工具,让他们能够轻松有效的操控机器人队伍?
研究人员的普遍想法是让机器人的操作过程高度自动化,增加其可以完成的任务数量,降低宇航员的工作量。2017年到2018年,研究团队完成了SUPVIS Justin实验,让宇航员使用电脑向机器人发出高级指令,操纵机器人Rollin’ Justin执行了一系列导航、维护和修复工作。
这仿佛就像科幻电影一般,在飞船上的宇航员只需要用手点几下,就能够让机器人自主规划和执行任务。
▲机器人Rollin’ Justin正在执行任务
但是,由于难以预测的的行星地表环境和刺眼的光照,哪怕是最好的物体探测算法也不能让机器人做到完全不出错。如果任务出现问题,或者需要机器人应对没有提前计划好的情况时,我们应该怎么做?
在地球上的工厂里,机器人的控制人员可能会下到车间里解决问题,但是如果按照类似的模式,由空间站中的宇航员去星球上检查情况,那么这次旅行将会十分的危险和昂贵。
最好的办法是我们把机器人作为宇航员在星球上的化身,让宇航员沉浸在机器人身临的环境中,看机器人所看,感机器人所感,指挥机器人完成任务。
二、力反馈装置让宇航员和机器人“感同身受”
为检验上述方法是否可行,2019年11月,欧空局进行了一项名为ANALOG-1的试验,以验证空间站宇航员和地面科学家是否能共同引导机器人完成模拟月球任务。
这个机器人搭载了两条安有摄像头的机械臂,还配备了抓取器、力矩传感器,以及许多其他传感器。力矩传感器可以感受力矩的物理变化并将其转化成可输出理解的信号,进而精确测量出力的大小,它是机械臂力反馈装置的重要构成元件,这个装置可以让宇航员和机器人“感同身受”。

▲机器人双臂正在移动
在国际空间站,宇航员Luca Parmitano通过电脑屏幕看到了机器人所拍摄的画面,他可以移动摄像头和使用定制的操纵杆设备。
他将手绑在操纵杆上,从而获得机器人手臂的操作反馈,他通过移动和打开自己的手来移动机械臂并打开机器人的夹钳,能够拥有接触地面的感觉,并能感受到岩石样本有多重,这些对宇航员了解星球地表情况至关重要。
但是这种方法也要面临诸多挑战:第一,国际空间站的低宽带限制了视频传输的质量;第二,国际空间站和其他星球距离遥远,宇航员和机器人的感受很难同步,信息延迟很可能导致传统的力反馈远程操作变得不稳定;第三,信息延迟可能会让机器人陷入危险的境地,造成机器人的损坏。比如,由于宇航员收到机器人的反馈过慢,可能会施加比他设想的更多的力,让机器人不能面对真实环境,加大了被损坏的风险。
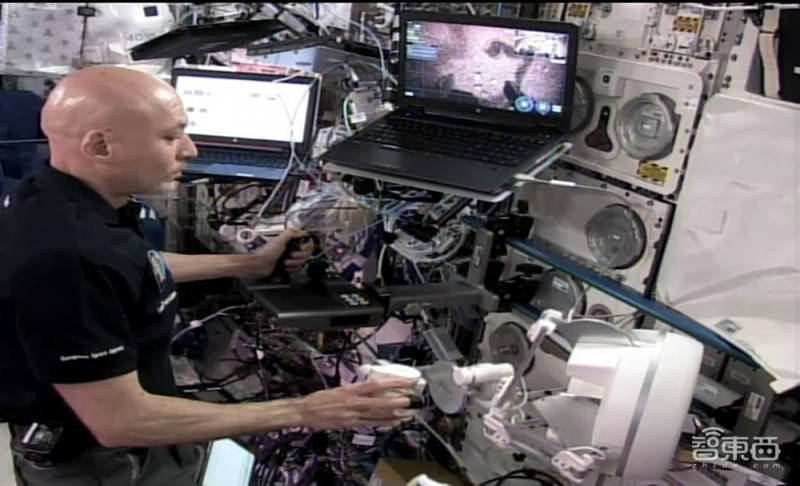
▲宇航员Luca Parmitano正在空间站操纵地面机器人
为了解决信息延迟这个问题,研究团队开发了一种名为TDPA-HD的控制方法,它可以检测宇航员施加的能量,并将该数值和速度指令一起发送给机器人。在机器人端,它测量机器人施加的力,并降低速度,让机器人向环境输出的力小于宇航员对它输出的力。
在宇航员端,TDPA-HD减少了对操作者的力反馈,因此传递给宇航员的能量不会多于从环境中测得的量。这维持了系统的稳定,意味着宇航员不会命令机器人,对环境施加比他们设想的更多的力,保证了宇航员和机器人的安全。
科学家将这种操作方法称为“监督自主”,比起机器人完全自主行动、控制者直接远程操纵、在处理如意外错误和信息延迟时更有效。控制者成为了一个监督者,如果机器人遇到问题,人类可以介入其中并帮助它完成任务。
不过宇航员反馈说,这种“监督自主”仍有局限性,沉浸感不足,他希望机器人可以完成更多的任务。
三、高自动化却带来高工作量?不符科学家预期
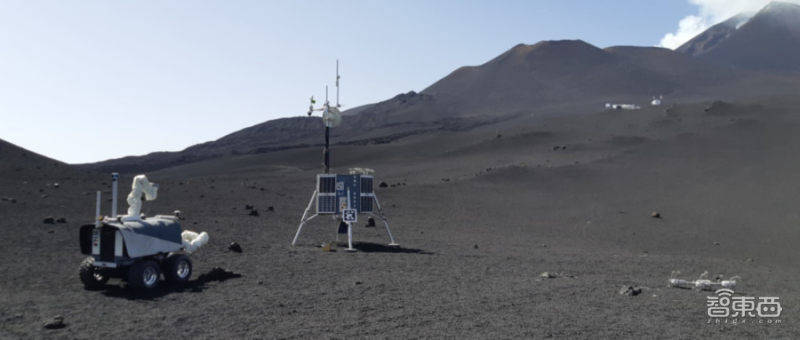
2022年6月到7月,研究团队参加了由德国航天局在埃特纳山进行的ARCHES试验活动。前宇航员Thomas Reiter在埃特纳山附近的卡塔尼亚镇的控制室,控制处于海拔2700米的熔岩地带的机器人。

▲ARCHES试验画面
这是他们在“扩展自主”方面进行的首次尝试,意思就是允许宇航员根据任务增加或减少机器人的自主性。2019年,宇航员Luca只能通过机器人的摄像头和操纵杆进行观察和运动,这一次Thomas拥有一个互动地图,他可以在上面进行标记,让机器人自动驶向标记点。
与2019年通过力反馈控制机器人机械臂相比,现在宇航员可以在Mask R-CNN(基于区域的卷积神经网络)的帮助下自动检测和收集石头。
从现实环境中测试研发的新功能,让研究人员收获了很多。特别是,自动化程度越高并不意味着宇航员的工作量越低,这个假设并不总是对的。
与宇航员经常使用自动采集样本相比,自动导航的使用频率并不高,这意味着它比操纵杆驾驶更费力。这可能是因为宇航员对自动系统信任度低,得到反馈的时间较长等。
未来,科学家希望能够测试一个真正扩展自主的、多机器人的场景,为此他们启动了Surface Avatar项目——在一个大规模的火星模拟环境中,国际空间站的宇航员将在地面上指挥一个由四个机器人组成的团队。
2022年6月,宇航员Samantha Christoforetti和Jessica Watkins进行了Surface Avatar项目的初步测试,第一次大型实验计划将于2023年进行,这次实验将是这个研究团队迄今为止最复杂的国际空间站远程机器人任务。

▲宇航员Samantha Christoforetti正在进行试验
结语:机器人或会在月球上与我们“隔空相望”
上述的科学场景在未来的月球和火星任务中可能会出现。对人类和机器来说,太空是一个充满很多未知与困难的地方。未来我们进行太阳系的探测时,在派人类执行任务之前,可能需要先发射机器人探测器到未知行星上探测水域。
在这之前,其他行星的探测器都是由预编程软件以及科学家从地面发送指令控制的,传输时间较长。我们通过提高机器人的自主性,提高了宇航员执行任务的科学回报率,并避免了人类登陆其他星球带来的潜在污染。
此外,这个研究对操作者在远处指挥机器人团队具有一般性参考价值,例如维护太阳能和风能园区和搜索和救援任务等。
来源:Robohub









机器人或会在月球上与我们“隔空相望”
智东西(公众号:zhidxcom) 编译 | 刘柏涵 编辑 | 程茜 智东西9月27日消息,预计在2023年,由欧洲航天局和德国航天中心 ...
一哥归来,物是人非,李佳琦也没辙
直播江湖安静了那么久,直到李佳琦复出才惊起一波巨大的涟漪。 9月份,没有一点点预兆的李佳琦直播间刷屏社交平台,久违的露面似乎 ...
31个省区市全部开通广电5G网络服务,全国统一客服热线已启用
出品 | 搜狐科技 编辑 | 张雅婷 9月27日,中国广电宣布,在西藏、青海两地启动5G网络服务。此前,已有20个省区市在6月27日、 ...
vivo推出最新折叠屏,堆料最猛、硬件几乎无缺点!
这手机可能是今年,最有意思、堆料最猛的一台折叠屏手机了。 谢谢你 vivo,回应了大家的期待,自从拿到了这台 vivo X Fold + ...
NASA航天器成功与“孪小星”相撞,对地球没有威胁
IT之家 9 月 27 日消息,美国东部时间周一晚上 7 点 14 分,NASA 的双小行星重定向测试 (DART) 任务宇宙飞船成功撞击了一颗 ...
“风口上的风口” 飞行汽车能“飞进”千家万户吗
新风口的出现,注定伴随着竞争与淘汰。 ...




- Copyright © 2013-2020 All rights reserved
- 联系我们 QQ: 3 38 52 5 5 3 9 0